

Окунаемся в симрейсинг.
2 поста
2 поста

20 постов
5 постов
У меня написана серия постов "от покупки до первых полётов на FPV квадрокоптере". Основная ценность профиля в ней. Остальные посты - чисто шевелить иногда аудиторию, обозначая, что я тут, и завлекать читателей в ту серию.
Когда я врывался в квадрокоптерное хобби, мне необходимо было решить, какой системы будет у меня аппаратура. На тот момент их было несколько: Flysky - самый доступный, вполне рабочий протокол, FrSky - самый популярный и активно развивающийся, Crossfire - самый надёжный и дорогой. Естественно ворваться я решил подешевле и покупкой аппаратуры Flysky-i6 предопределил стандарт связи своих квадов на долгие годы.

С неё начинали многие.
Эта аппаратура прослужила мне успешно и долго, и жива до сих пор, однако когда вышла Flysky NV14 Nirvana - я не смог удержаться.

Аппа была качественно спроектирована некоей компанией UndergroundFPV, что отразилось на действительно выдающейся эргономике.
Помимо увеличения количества каналов (что всегда хорошо, но не всегда прям необходимо), там был цветной тач-скрин, очень много тумблеров, уникальный и удобный форм-фактор гигантского геймпада, интерфейс EdgeTX и главное - возможность расширения модулем стандарта JR. То есть все мои Flysky совместимые квады всё ещё поддерживаются, но при желании уйти на другой протокол, я смогу поддержку этого протокола организовать модулем. На тот момент мне уже было очевидно, что квады со мной надолго и совершенно очевидным следующим протоколом был Crossfire от Team Black Sheep и я приобрёл модуль TBS Crossfire Lite.

Пик в радиоуправлении на тот момент.
На деле NV14 оказалась очень проблемной и оттого непопулярной. Во-первых питание модулей было откровенно слабым и требовалась очень непростая доработка (с перерезанием дорожек на плате и допайкой мелких SMD-транзисторов), что всё равно не обеспечивало питанием самые мощные модули (TBS выдаёт 2 Ватта). Во-вторых хоть официально поддержка EdgeTX этой аппы есть до сих пор, мой экземпляр не выключается, а перезагружается. И для выключения приходится вынимать аккумуляторы, а это долго, так как крышки на резьбе. В-третьих даже при внешнем питании модуля, он совершенно случайно иногда просто не включается, скорей всего какой-то баг прошивки. Из-за этого активно модуль я использовать не стал, а перебивался Flysky. Время шло и вот уже от TBS всё меньше и меньше новостей и обновлений, оборудование дорожает, и оказывается, что абсолютно лучшим протоколом становится ExpressLRS. Открытое и живое сообщество активно разрабатывает современный протокол и очень оперативно реагирует как на найденные баги, так и на предложения внедрения новых функций. А различные производители конкурируют по цене за потребителя и оборудование оказывается не таким дорогим, как TBS, но при этом откровенно лучше если не по качеству, то по функциям, да и в большем разнообразии.
Разновидности оборудования ELRS две - на 900МГц и на 2.4ГГц. Сделать выбор было сложно до тех пор, пока не выходит модуль Radiomaster Nomad.

Всё и сразу.
Он мало того, что поддерживает оба стандарта частоты на выбор, но и имеет режим в котором канал связи использует сразу оба этих диапазона (Xrossband). Здесь моя логика была уже обратной, какую бы аппу я в дальнейшем не купил, Nomad точно закроет все мои потребности на годы вперёд. И я приобрёл его. Сразу после него выходит аппа Radiomaster GX12 - также двух-диапазонная, как и Nomad.

Если вы начинаете, но знаете, что это надолго - Radiomaster GX12 хороший вариант с заделом на будущее.
Но при этом с пиксельным не тач дисплеем (как на Flysky-i6!). Надо признаться честно, настраивать EdgeTX без тачскрина очень сомнительное удовольствие и откатываться назад в удобстве я не хотел. Единственной аппой с тач-скрином у Radiomaster (да и среди конкурентов) был TX16 - старый флагман, который покупать имея NV14 смысла не было. Тем временем становится очевидно, что если мне и выпадет шанс где-то полетать, то к этому моменту нужно иметь рабочую ELRS систему, так как приёмник под Flysky хоть ещё и можно купить, но ничего интересного за много лет они не представили, а у ExpressLRS почти каждый релиз новый функционал и новые режимы. Поэтому когда я увидел анонс Radiomaster TX15, я не колебался ни минуты.

TX15 - флагман, без сомнений. Как бы не хотели Radiomaster поддержать старый TX16.
Официальный магазин на Али сделал доступным предзаказ прямо в день анонса, чем я и воспользовался. Забавно, что они формально не стали делать его флагманом, хотя по всем характеристикам, кроме размера дисплея, TX15 лучше чем TX16 при той же цене.
Уже пока писал пост, увидел, что у Flysky вышла аппаратура PA01. Достаточно революционная для Flysky, но недостаточно привлекательная для сообщества и даже для меня, "фаната" протокола Flysky. Она поддерживает свой новый протокол AFHDS3 (он не совместим с моими старыми приёмниками, там - AFHDS2A), но её можно перешить на поддержку ExpressLRS (что сделает 99% покупателей). У неё цветной дисплей, но не сенсорный - это провал, управлять EdgeTX кнопками - мука. Диапазон частот один - 2.4ГГц. И самое главное - она дороже RM TX15, думаю её "успех" на рынке предопределён.
Нахрена я всё это написал? Ну во-первых чтобы новички не боялись сделать "неправильный" выбор. На момент моего выбора, ExpressLRS не существовало. Crossfire прожил бы дольше всех, но аппа под него всё равно потребовала бы замены. С любым адекватным выбором актуальность оборудования - годы. Также с любым оборудованием почти всегда можно плавно вырулить в лучшие технологии. Во-вторых, показать, что индустрия развивается и откровенного маркетинга пока мало, популярные модели популярны по достаточно объективным причинам. Если разбираешься, сделать выбор достаточно просто.
Ну и как обычно, всех увлечённых FPV квадрокоптерами, особенно новичков, зову в личную телегу (не канал, ник в профиле), чтобы ответить по мере сил на любые квадрокоптерные вопросы мирного толка.
Это серия постов о том, как я вкатываюсь в симрейсинг.
Как мы выяснили в прошлом посте серии, вершиной "рабочего места" симрейсера является кокпит из алюминиевого профиля.

Типичный алюминиевый профиль

Модель кокпита, которую выбрал я.
Я кратко опишу остальные варианты, которые есть у начинающего симрейсера:
Прикрутить рулевую базу к столу. Педальный блок просто на полу. Этот вариант быстро показывает себя недостаточным, как только приходит понимание, что основная критическая информация о состоянии машины передаётся через обратную связь руля. И чем сильнее усилие этой связи, тем подробнее информация (грубо говоря выше разрешение, так как выше диапазон усилий). Комфортные усилия на педалях тоже растут, чтобы, грубо говоря, ноги соответствовали рукам. Тяжело скоординировать организм, чтобы руками он выдавал усилие близкое к реальным, на на педаль тормоза жал нежно, да ещё и дозировал её перемещение. Интуитивно жмёшь на педали от души и начинаешь от них отъезжать вместе с креслом. Монитор шатается на каждом повороте.

Народный конфиг
2. Объединить педали и руль любым каркасом (используются самодельные сварные или деревянные конструкции), системой "Джокер" или покупные варианты. Офисное кресло фиксируется к этой конструкции самостоятельно. Педали теперь не отъезжают, но нагрузка идёт на узлы, которые к этому могут быть не готовы (например, колёсики офисного кресла). Монитор "отвязан" и больше не шатается. Но на каждом повороте конструкция раскачивается в стороны и норовит опрокинуться набок.

Тут нет "крепления" офисного кресла. По факту - просто перекладина, за которую цепляют колёсики кресла.
3. Полный кокпит с сиденьем, сделанный на трубах круглого или квадратного сечения. Начиная от Playseat Challenge (достаточно слабая конструкция, а в наших краях ещё и неоправданно дорогая), заканчивая вполне серьёзными каркасами. Сварные конструкции хоть и сопоставимы по жёсткости, всё равно не имеют той гибкости настройки, что даёт профиль. Модернизировать и дорабатывать их сложнее.

Playseat Challenge
По итогу я понял, что компромиссы обойдутся мне разочарованием и я принял решение собирать кокпит на профиле.
Для этой авантюры существует несколько подходов:
Проектируем кокпит самостоятельно (есть программа MayCad, которая выдаст всю необходимую для заказа информацию с поправкой на конкретный ассортимент выбранного завода). Длины и размеры профиля, а также весь крепёж заказываем на профильном заводе (то есть на заводе, чей профиль - изготовление алюминиевого профиля). Собираем всё сами.
Заказываем готовый комплект на заводе. Есть как минимум один, в ассортименте которого доступен кокпит. Проект их. Так же нарезают, комплектуют и доставляют заказ. Собираем сами.
Обращаемся к людям, которые специально разрабатывают кокпиты и знают все тонкости от и до. Приходит либо готовый, либо требующий только соединения двух-трёх частей кокпит.
Варианты 1 и 2 дают нам полуфабрикат кокпита, до полноценного не будет хватать сиденья и элементов крепления всех органов управления к профилю - напрямую их крепить сложно либо невозможно. Под педали нужна плита с отверстиями под вашу модель, желательно с диапазоном регулировок; под рулевую базу тоже плита, тут диапазон не так важен, как набор отверстий именно под вашу базу; для сиденья нужны кронштейны. Эти вещи нужно где-то найти, убедиться, что они подойдут и купить-доставить.
На этом этапе уверенность, что пункт 3 будет слишком дорогим немного рассеивается. Вместе с уверенностью, что всё друг к другу подойдёт. Например: ширина кокпита из варианта 2 (а изменить её мы не можем в отличии от пункта 1) не совпадает с шириной универсальной плиты под базу (универсальной в плане под любые базы, но не под любые кокпиты), которую я нашёл в продаже. Крепить пришлось бы со смекалкой, проставками и геморроем.
Я пошёл по варианту 3 и только после получения, сборки и настройки кокпита я осознал сколько времени и нервов сэкономил.
Почему готовый кокпит оказался лучше.
Во-первых, все элементы крепления были в комплекте и под моё оборудование. Состав оборудования я сообщил заранее и получил гарантированную совместимость. При этом крепление поддерживает много моделей, но не прям все.
Во-вторых, помимо функциональных частей, завод предлагает декоративные элементы: заглушки в торец профиля, ленты, закрывающие пазы. Также есть услуга порошковой окраски или анодирования. На всём этом я бы точно сэкономил, хотя бы потому, что было бы лень считать сколько заглушек и метров ленты мне нужно (возможно за меня это посчитал бы MayCad). Вышло бы уродливо и небезопасно, торцы без заглушек обработаны достаточно грубо.
В-третьих, сиденье также в комплекте, оно на салазках и имеет регулировку наклона спинки. Оно точно сделано для автомобилей, поэтому о надёжности можно не беспокоиться.
В-четвёртых - эргономика. Хоть кокпит получится максимально настраиваемым - буквально каждое соединение можно двигать в максимальном диапазоне, однако фиксируется всё это винтами намертво и не предполагает постоянного туда-сюда передвижения. Поэтому процесс входа-выхода может быть затруднён, особенно если кресло установлено без "автомобильных" салазок. В моём варианте наклон консоли под базу даёт заметное удобство входа-выхода, относительно прямой стойки (заложить наклон самостоятельно я бы точно не допёр).
В-пятых продуманы мелочи, о которых я бы даже не подумал. Используются винты с полукруглой шляпкой, их можно спокойно задеть и не почувствовать. Каркас стоит на ножках, т-гайки уже вложены в пазы и зафиксированы резинками в примерном месте крепления.
Никаких шансов самостоятельно получить подобный кокпит, тем более с первой попытки, у меня не было. Разве что скопировать с имеющегося под рукой, но такой возможности не было, а если бы и была, то всё равно неизвестно откуда брать плиты под базу и педали и кронштейны под сиденье. Всё равно пришлось бы искать похожие и покупать на удачу.
В итоге кокпит вышел каноничный. Оборудование тоже поменялось под стать. Установлены педали SimJack Pro и шифтер SimJack HQB-BC-N. Поэтому полностью освободился на продажу комплект Logitech G27 с приблудой, позволяющей использовать педали и шифтер без базы.
С оборудованием SimJack нарвался на пару приколов, расскажу о них в следующем посте.
P.S. Все надписи на картинках - не реклама.
Пожалуй, заведу я новую шарманку тут. Если кто не в курсе, я уже оформил серию постов по теме FPV квадрокоптеров, поделился тем, что знаю - от покупки до первых полётов.
Это была тема, с которой давно и хорошо был знаком. Теперь же будет серия про то, как я вкатываюсь в симрейсинг почти с нуля. Снова не стану постить в сообщества, так как там и без меня все знают что к чему.
Ну а для тех, кто не в курсе, симрейсинг (simracing) - это автомобильные гонки (и другие автодисциплины) на симуляторах - компьютерных программах-играх.
Есть огромное количество гоночных игр, и не все из них признаются симуляторами. Границы, понятно, условные, но, например, серия Need For Speed никогда к симуляторам не относилась.
Сразу оговорюсь, что знаний по этой теме у меня в разы меньше, чем по FPV и здесь встретить откровенный бред шансы гораздо выше. Собственно для формирования у себя адекватного мнения по теме я и затеял всю эту серию.
Основные игры-симуляторы сейчас (в рандомном порядке): Assetto Corsa, Assetto Corsa Competizione, iRacing, Rennsport, rFactor 2, Automobilista 2, Live For Speed. Все они очень разные начинаю от цен и ценовой политики, заканчивая качеством и количеством трасс и машин.
Первым делом расскажу, о том, каких иллюзий я не имею (или имею). Конечно, всё упирается в бабки, но эти бабки совершенно не сравнимы с теми, которые требуются для участия в любых реальных автосоревнованиях, поэтому для себя определил хобби как дешёвое относительно того, что оно даёт. А насколько может быть хорош симулятор, я знаю не понаслышке.
Собственный потенциал, как гонщика я особо оценивать не собираюсь. Всегда увлекался гонками на компе, одно время много катался в реале на картинге, давно есть начальное оборудование (Logitech G27) и кое-какой накат хотлапов в LFS. Серия будет посвящена постройке "кокпита", ну и, возможно, первым успехам на поприще симрейсинга. Основным мотиватором сейчас выступает дрифт, очень понравилось "валить боком", но и кольцо меня вполне захватывает, совершенно случайно в ютубе увидел стримы Fotonа и прям затянуло. Очень мощный скилл, плюс адекватный человек (по моим, конечно, меркам).
Для тех, кто не знает, и для упорядочивания собственных мыслей.
Вершиной "рабочего места" симрейсера считается жёсткая металлическая конструкция объединяющая кресло, руль, педали, рычаг КПП и рычаг ручного тормоза (если необходим) - так называемый "кокпит". Я ещё не решил, насколько сильно моя версия будет близка к идеалу, но скорей всего из-за громоздкости я пойду на неканоничные компромиссы.
Конечно, если бы вопрос свободного места не стоял так остро, я бы собирал кокпит на алюминиевом профиле. Ещё весомый фактор: у меня уже есть VR гарнитура, поэтому мой кокпит не будет содержать мониторов и креплений под них. Из-за этого велик соблазн собрать "половину" кокпита, которую надёжно "пристёгивать" к имеющемуся сидячему месту - креслу или дивану. Вот над такой конфигурацией я сейчас усиленно думаю.
Ну и чтобы читатель не думал, что я тут только теорией занимаюсь, точка невозврата пройдена: куплена и пылится на полке база Moza R9.
Так же как и с играми, симрейсинговое оборудование имеет широкий спектр "серьёзности". Нормальный руль обязан иметь обратную связь (фидбек, feedback). То есть руль должен быть способен крутиться самостоятельно (или препятствовать ручному вращению) от встроенных в него моторов. Без этого никакого симрейсинга не будет, так как основная информация о том, что происходит с машиной приходит через руль. Также педали должны быть как минимум с плавным откликом, то есть компьютером распознаваться как ось, а не как кнопка. Самые дешёвые комплекты "руль-педали", это "пустая" пластиковая баранка и пара ножных кнопок - детские игрушки.
Низший уровень сим-оборудования - это как раз Logitech G25\27\29\920\923. Это всё по сути один и тот же руль, с небольшими отличиями в комплектации и набором кнопок. Основные характеристики:
Обратная связь через шестерёнки.
Педали на потенциометрах (переменных резисторах).
Максимальное усилие на руле - 2.5Нм.
Рассмотрим подробно эти три пункта.
Механика обратной связи. Шестерни достаточно шумный и слабый (по силе, не по надёжности) механизм, и я решил сразу пойти в сторону прямого привода (DD, Direct Drive). На данный момент - это топовая технология, которая ещё и стала дешеветь. Скорей всего, технически можно сделать мощный механизм и на шестернях и на ремнях, но смысла так делать мало, так как прямой привод в итоге получится надёжнее и дешевле.
Педали тоже стараются приблизиться к реализму, и если педаль газа достигла совершенства (во многих реальных машинах педаль газа на потенциометре), то с тормозом есть куда стремиться. Наиболее реалистичным считается тормоз с реакцией на усилие, а не на перемещение. В моих планах сменить педальный узел Logitech уже после сборки кокпита.
Усилие на руле. Может показаться, что стремление рулевых баз всё больше увеличивать максимальное усилие абсурдно, но на деле выходит, что большее "разрешение" обратной связи положительно сказывается на точности управления и большое максимальное усилие этому только способствует. Я остановился на 9Нм, пока кажется, что увеличения крутящего момента почти в 4 раза - это перебор, но наличие моделей с усилием в 21Нм говорит о том, что это всё вполне востребовано.
Отдельно стоит упомянуть, что для рулей с прямым приводом сейчас практикуется продавать отдельно базу под руль (фактически большой трёхфазный электромотор плюс электроника и интерфейс под кнопки) и сам руль (баранка с кнопками, крутилками, лампочками и даже дисплеем). Из-за этого есть возможность купить несколько по конфигурации рулей: формульный прямоугольный с кучей регулировок и кнопок; круглый дрифтовый максимально лёгкий, раллийный или наскар с нужными настройками. Более того, например у фирмы Moza можно отдельно сочетать электронную часть (набор и расположение регулировок на руле) и физическую (круглый, усечённый круг, прямоугольный). Для моих целей я остановился на круглом руле (под дрифт) с минимальной ценой. Как оказалось, купить усечённый круглый Moza ES и докупить к нему совместимую круглую "железяку" выходит дешевле, чем сразу круглый, но более навороченный Moza CS. Поясню, почему под дрифт нужен именно круглый руль: в дрифте при смене направления заноса (перекладке) руль можно отпустить и передние колёса выравниваются самостоятельно, то есть руль сам быстро вращается и поймать его гораздо проще, если он идеально круглый.
Начальное оборудование в кокпите выглядит так:
База Moza R9
Руль Moza ES в круглой конфигурации
Педали - от Logitech G27
Рычаг КПП - от Logitech G27
Ручник - USB с али.
Мысль об симрейсинге зрела давно и однажды я задался вопросом, можно ли имеющееся оборудование (а у меня полный комплект Logitech G27, это база+руль, три педали и рычаг КПП) будет продолжать использовать по мере покупки более серьёзных игрушек. Дело в том, что в Logitech G27 педали и рычаг КПП подключаются проводами к рулевой базе, а уже база по USB к компу. То есть убрать базу и использовать педали и рычаг не выйдет. База питается от отдельного БП и к чести инженеров Logitech без БП исправно работает через USB только без обратной связи. Хороший симулятор даёт возможность использовать все подключённые устройства в любых комбинациях, поэтому в моём случае, если я обновлю базу, я могу отключить старую от БП, положить в сторонку и кататься. Но оказалось есть способ лучше. Умельцы припаяли разъёмы к ардуино, написали программу и получилось устройство с которым педали и рычаг Logitech можно подключить по USB к компу минуя базу. Это устройство я собрал и оно великолепно работает. Потом, я понял, что в дрифте мне необходим ручник, купил на али самый популярный и выяснилось что его электроника это примерно та же ардуино с примерной той же программой внутри. То есть на один USB можно повесить педали, КПП и ручник, но руки реализовать пока не дошли.
P.S. Статья настоялась в черновиках, время идёт и всё вышло даже лучше чем планировал. Кокпит собран и вопрос оборудования полностью закрыт, можно кататься. Подробности в следующем посте.
Напоминаю о том, что посты пишутся в основном поддержать активность профиля. А профиль создан, чтобы помогать людям разбираться в фристайл квадрокоптерах. Основное уже написано: купили, собрали и настроили дрон с нуля - смотрите профиль.
Сегодня расскажу о самых маленьких FPV квадах. Их называют тинивуп (от торговой марки tinywhoop). Их маленькость не должна вводить в заблуждение, управлять ими так же непросто и все их возможности схожи с большими квадами на 5 дюймов и более.

Сначала замечу, что сейчас возможно собрать или купить дрон практически любого размера, но вся квадрокоптерная физика и электроника масштабируется неодинаково, поэтому самым манёвренным будет 5-дюймовый дрон; долголёты и дальнолёты - это как ни странно 4 дюйма и 7 дюймов; а самые маленькие квады хороши тем, что можно безопасно летать в помещении и рядом с людьми.
Плюсов у тинивупа масса:
1. Компактность и лёгкость.
2. Возможность летать в помещении, рядом с людьми и хрупкими предметами. Отсюда независимость от погоды.
3. Доступность по сравнению с крупными собратьями.
4. Очень высокая прочность популярных моделей, в основном за счёт низкой массы.
5. Аналогичный опыт пилотирования fpv, что и у 5 дюймов и более.
Однако как я раньше писал, в качестве первого дрона я тинивуп не рекомендую. И вот почему:
1. Собрать из комплектующих такой сложнее ,чем 5-дюймовый и дороже, чем купить готовый.
2. Его динамика достаточно сильно отличается от 5-дюймового фристайл дрона и полученный опыт хорошо дополняет "настоящий" фристайл, но не заменяет его.
3. Начинать учиться пилотировать в помещении идея так себе: дополнительные стены и потолок обязательно будут проверены на прочность ни один десяток раз, что не будет мотивировать пилота продолжать обучение.
4. На улице же ветер способен быстро унести квад за пределы возможностей слабого видеопередатчика.
5. Также при первой покупке всего нужного оборудования может выйти, что очки и аппаратура в два-три раза дороже дрона. Это уменьшает "серьёзность" дрона в глазах собирающего, а разбираться во всех тонкостях настройки и совместимостях там не меньше, чем в большом дроне.
Поэтому идеальным вариантом тинивуп будет в роли второго дрона. Когда в сезон мы успели полетать на улице, а в зимний период не готовы мёрзнуть и рисковать большим дроном. Для поддержания (а то и улучшения) навыка пилотирования отлично подходит комнатный дрон.
Так как я взял курс на ExpressLRS в своих постах, продолжим и здесь. Нам будут доступны три комплектации дрона:
1. Без приёмника. Докупаем самый компактный приёмник ExpressLRS, паяем на UART, настраиваем и готово.
2. Со встроенным UART приёмником. Схематически то же, что и в первом варианте, но исполненное единой платой.
3. Cо встроенным SPI приёмником.
Обычно эти параметры указаны в названии комплектации или дрона.
Между двумя последними вариантами есть тонкость. Дело в том, что приёмники ExpressLRS (как и передатчики, то есть внешние или внутренние радиомодули) хорошо бы использовать с последней прошивкой. Причём версия прошивки 3.0 в передатчике не совместима с версией 2.0 в приёмнике. И если прошить отдельный или встроенный UART приёмник (комплектации 1 и 2 выше) мы сможем без проблем стандартным софтом, то с SPI вариантом будут проблемы. Так вышло, что для SPI приёмника код прошивки ExpressLRS должен быть встроен в код Betaflight полётника. И поэтому, обновление этого кода мы должны брать у разработчиков Betaflight, а для них это не приоритетная задача. И может так выйти, что передатчик мы обновили раньше, а SPI приёмник в свежекупленном тинивупе будет на версии 2.0 и связать с нашей аппой мы его не сможем.
Возможно, когда вы читаете этот пост, проблема уже не актуальна: Betaflight выпустила прошивки с ExpressLRS v3.0 внутри, а производители вупов шьют её на заводе. Но если это не так, то нам нужно где-то найти модифицированную прошивку Betaflight под наш полётник с ExpressLRS 3.0 внутри. Если это ваш случай, обращайтесь за подробностями ко мне в телегу.
И ещё одна тонкость. На большинстве вупов разъём батареи - это PH2.0

Разъём совершенно не рассчитанный на большие токи. Можно заметить на фотографии, что пины представляют собой сложенную вдоль полоску металла. Это самый плохой вариант.
При большом токе, сопротивление разъёма настолько высокое, что напряжение начинает проседать практически с начала полёта и полётник предупреждает нас о разряженной батарее гораздо раньше, чем должно быть теоретически. Вариант разъёма с цельными металлическими пинами не сильно лучше.
Но индустрия не стояла на месте и предложила целых две альтернативы. Это разъём BT2.0 от компании BetaFPV. Все вупы от этой компании идут с ним.

И разъём GNB27 от производителя батарей GNB.

Замена разъёма на тинивупе с PH2.0 на любой из этих двух очень ощутимо меняет ситуацию. Я перепаял два своих вупа и все батареи на BT2.0 и не пожалел. Квад летает дольше на высоком напряжении и просадка теперь действительно указывает на то, что аккум разряжен.
И ещё до недавнего времени почему-то считалось что маленькие батареи не нуждаются в режиме хранения. Но дело в том, что все деструктивные процессы в маленькой батарее идут быстрее и страдают они от перезаряда, переразряда и неправильного хранения гораздо сильнее. Это компенсировалось низкой стоимостью батарей, но всё же появились нормальные зарядки с низкими токами и режимом хранения, например Vifly Whoopstor.

Заметьте, запитать можно от USB-C (только 9В и выше), от блока питания или от большого аккума. Есть режим хранения и поддержка как обычных LiPo так и LiHV (4.35В) батарей. Шесть независимых каналов с настройкой тока и два разъёма на выбор - PH2.0 или BT2.0. Звучит как реклама, но это реально штука, которая сделана со знанием потребностей вуп-пилотов. Если же найти хорошую зарядку получилось только под другой разъём, то можно напаять переходников. Токи заряда не такие большие и использование переходников на зарядке допустимо. На вупе же переходник ухудшит и без того плохую ситуацию ещё и добавив веса.
Кратко подведём итоги:
Тинивуп хорош как дополнительный дрон, для ситуаций, где большой дрон некомфортно использовать.
Идеальным будет дрон с UART приёмником и разъёмом BT2.0 или GNB27, а для зарядки использовать продвинутое устройство с регулировкой тока и режимом хранения.
Пришло время разобраться с цифровыми видеосистемами на дронах.
Если не понимаете о чём я, то лучше ознакомиться с моими прошлыми постами, там мы купили, настроили и собрали фристайл квадрокоптер, а теперь вдаёмся в подробности не критичных аспектов хобби.
Их всего три на рынке, но доминирует одна - DJI.


DJI - компания большая, делает разные дроны (в том числе промышленные) и всё что к ним нужно, с ней не сравнится ни одна другая, выпускающая что-то для FPV. Поэтому выпуск цифровой системы, которую можно поставить на любой дрон, в сообществе восприняли (и до сих пор воспринимают) с подозрением.
Интеграция с существующими системами минимальна: очки только DJI - спецификации закрыты; видеопередатчик только производства DJI под разными брендами; камеры возможно производятся другими фирмами, но снова совместимы только с их видеопередатчиками.
Внутри VTX находится приёмник - совместим только с аппаратурой DJI Remote Controller.
В итоге владельцы других радиосистем покупают и "катают" приёмник на дроне просто так.
НО. Картинка при этом ни в какое сравнение с аналоговой. Максимально качество 720p! Хорошее качество всех компонентов и известные характеристики видеоканала. Надёжный вариант здесь и сейчас. Из минусов - теоретический риск завершения производства компонентов в пользу более дорогой недавно анонсированной системы. Но пока системы есть в продаже.
Вторая система: недавно вышедшая - Walksnail Avatar\Fatshark Dominator HD.

По заявленным характеристикам она лучше DJI - максимальное качество 1080p. Компания Fatshark - бесспорный лидер среди производителей аналоговых очков. Это компания, которая хорошо знает рынок FPV и, за время существования, заработала хорошую репутацию надёжного производителя именно FPV оборудования. То есть теоретически будет слушать сообщество и реагировать на критику гораздо охотнее чем это делает DJI. Это плюс. Walksnail до анонса видеосистемы себя в FPV не проявляла, а Fatshark имеет компетенцию исключительно в очках, даже приёмные модули не пользовались успехом.
Из минусов же - пока система не смогла сравняться по параметрам с DJI - видео менее стабильно и не такое качественное как у DJI, хотя и сравнимо, а режим 1080р, насколько я знаю, пока вообще не рабочий. Но Walksnail\Fatshark деватьcя некуда, либо доводить до ума эту систему, либо сгинуть.
Тут упомяну минусы обеих систем. Дело в том, что для цифровой передачи видео нужен кодек и процесс кодировки\декодировки картинки занимает время. В аналоговом режиме картинка формируется практически одновременно с сигналом. Поэтому, когда сигнал становится слабым (из-за препятствия или большого расстояния), аналоговая картинка становится с помехами, но при этом обновляется так же быстро, а вот цифровая "рассыпается" на крупные блоки, либо задерживается целиком. Так вот, минус цифровой системы не столько в общей задержке (которая есть и даже различается хорошим пилотом) сколько в её непредсказуемых перепадах. К стабильной, пусть высокой задержке можно адаптироваться, но плавающая задержка может дезориентировать больше чем помехи (но все люди, конечно, разные).
Именно поэтому, насколько я знаю, ни один топовый чемпионат по гонкам на квадах не выигрывался пилотом с DJI системой.
По той же причине, хоть на бумаге мы имеем 720p или 1080p, производитель пытается выжать из плохого сигнала максимум пользы. Режимы с худшим качеством имеют ниже задержку, также есть Focus Mode, в котором на периферии кадра качество ниже чем в центре.
Стоит упомянуть, что для хорошего качества требуется более широкая полоса частот и поэтому одновременно комфортно летать могут меньше пилотов.
Третья цифровая система - это HDZero. Сейчас очков под неё в продаже нет, есть только модули для очков, в которых есть вход HDMI (такой же модуль есть и для Walksnail).

Особенность этой системы в том, что алгоритмы были изначально разработаны на низкую ("нулевую" - zero) задержку. Поэтому, при плохом сигнале, картинка портится по типу аналогового сигнала, много маленьких блоков начинают "выпадать", общая картинка при этом деградирует, но даёт представление о происходящем с низкой задержкой. И вот на этой системе как раз был пилот который выиграл топовый чемпионат, это отмечалось производителем с большой гордостью.
Минус один - качество изображения где-то посередине между DJI и "аналогом".
Ну а общим минусом всех цифровых систем будет стоимость, причём как очков, так и камер с видеопередатчиками, что удорожает сам дрон и заставляет пилота больше осторожничать и собирать меньше разных дронов.
За пределами поста останутся подробности о том, что при равных мощностях передатчика эти системы имеют немного разную дальность; что где-то доступны лёгкие передатчики для мелких квадов, а где-то нет; как системы справляются с переотражениями сигнала и как все эти параметры соотносятся с аналоговыми системами. Также какое взаимное влияние они друг на друга оказывают и как это минимизировать. Есть тонкости какого типа антенны использовать на каких разъёмах и т. д. С такими вопросами - в телегу.
Кратко подведу итог:
1. Лучшее сейчас - это DJI.
2. Если веришь в светлое будущее и хочется финансировать "правильные" компании, то Walksnail. 3. Гонщик - HDZero.
Стоимость всех систем сопоставима.
Основная цель поста - привлечь новых поклонников FPV полётов на квадрокоптере. Что такое FPV и как самостоятельно купить, собрать и настроить динамичный дрон я рассказал в своей серии постов (начиная со второго в профиле). На любые вопросы отвечаю в телеге (также в профиле).

В этом посте не будет никакой критической информации про FPV дроны, но мне как-то нужно поддерживать активность, иначе гайд будет пылиться в забвении.
Сегодня расскажу о дешёвом дроне с режимом акро, но без FPV (то есть без камеры). Я в своё время получил массу удовольствия с ним, а также прокачал навык полётов LOS (полёты глядя на дрон, а не в очки).
Итак, рецепт такой:
1. Аппаратура Flysky-i6 - 2500р. Модели i6X и i6S тоже годятся, но будут дороже, а суть не поменяется.
2. Квад Syma X5C - 3500р.
3. Полётник для щёточных моторов со встроенным приёмником Flysky (поиск али: F3 EVO Micro Brushed) 2000р.
8000р за всё, хотя аккумов мало не бывает, я бы штуки 4 рекомендовал. И ещё трёхлопастные пропы с али за 100р ставили. Всё это было дешевле 5 лет назад, когда я собирал, но я не уверен, что сейчас есть что-то похожее дешевле.
После того, как наиграемся с квадом из коробки (может вштырить на пару месяцев в сезон), снимаем с него камеру, ножки и защиту пропов (снижаем вес, разница существенна). Насчёт камеры радоваться не стоит, она там самого отвратного качества, как на первых мобильниках.
Выпаиваем штатный полётник, паяем купленный, привязываем наш пульт. Я уже не помню что с настройками, но по-моему будет летать на заводских.
И получается абсолютно неубиваемый, весёлый и очень безопасный акро-квад. Его можно ронять на асфальт с любой высоты и влетать в стёкла, людей и т. д. Даже без защиты пропов он безобидный. У нас было два, мы устраивали бои на квадах, не пострадали даже пропы. Далеко улететь нельзя, так как быстро потеряете из вида или будет не различить где перед, где зад (это основная проблема в LOS).
Плюсы:
1. Дешёвый уличный акро-квад.
2. Тихий, ничего подобного уже не будет.
3. Неубиваемый.
4. Безопасный для окружающих людей и вещей.
5. Настоящий акро режим со "взрослой" прошивкой Betaflight.
6. Тренируем LOS.
7. Пульт может послужить с более серьёзным квадом.
8. Море удовольствия.
9. После этого, квад собранный по моему гайду (или подобный) убьёт динамикой наповал.
Минусы:
1. Без FPV. Теоретически можно где-то взять комплект камеры и видеопередатчика Eachine TX01 (на али его сейчас нет). Но очки дёшево брать не стоит и тогда вся затея теряет экономический смысл. Также мы не тренируем FPV.
2. Щёточные моторы - расходник, на али доступны, но перепаивать их может надоесть.
3. Всё, кроме может пульта, не имеет перспективы использования в случае более глубоко погружения в хобби.
4. Всё ещё нужны навыки пайки и настройки.
5. Betaflight придётся шить старой версии, такой процессор в актуальной версии не поддерживается.
6. Всё ещё дорого для "попробовать и выбросить", продать это поделие вряд ли удастся.
7. Не получится подключить к компу для учёбы в симуляторе.
8. Лишними окажутся: штатный пульт, полётник, камера, ножки и защита пропов.
В общем для безопасного и доступного знакомства с акро, даже для ребёнка, этот вариант подходит, но и не более.
Короче, поделился опытом, летать было весело, но это всё от страха и незнания о настоящем FPV. Сейчас же я мало того, что в FPV образовался, так ещё и поделился знаниями с общественностью. Добро пожаловать в посты о настоящем FPV и телегу.
Мы продолжаем углубляться в тонкости fpv фристайла. Для случайного читателя снова напомню, что, если вы прочитаете мои посты со второго до последнего, то сможете купить, собрать, настроить и управлять фристайл квадрокоптером.
Сегодня настроим аппаратуру, так, чтобы она предупреждала нас перед включением, от том, что некоторые тумблеры выставлены в неверное положение. Например нам не нужно, чтобы при включении аппы квад сразу армился (включались моторы) - это опасно. Но тумблер арма мог случайно переключиться в рюкзаке, а перед включением мы забыли проверить самостоятельно.
Мы можем заставить аппаратуру автоматически проверять положение тумблеров и напоминать нам переключить их перед включением.
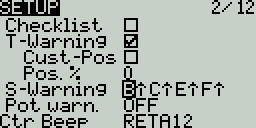
Скрин будет для Radiomaster Zorro, но разница с другими будет минимальная.
Нажимаем кнопку MDL, дальше PAGE, отображается меню SETUP. В нём крутилкой идём до строчки S-Warning и нажимаем на крутилку. В строке перечислены все двух- и трёхпозиционные переключатели. Здесь мы задаём положение, в котором аппа позволит нам её включить. Если положение отличается от заданного, то аппа не включится (не станет передавать команды по радио), пока переключатели не займут настроенное положение (возможность проигнорировать тоже будет).
Тумблеры обозначены буквами, эти буквы можно найти на корпусе рядом с переключателем (будет SA, SB, SC..., что в интерфейсе соответствует A, B, C...).
По умолчанию рядом с буквой - пробел. Это означает не учитывать положение тумблера.
Выбрав букву крутилкой, мы можем нажатием менять настройку. Стрелка вверх или вниз означает крайнее верхнее или крайнее нижнее положение тумблера соответственно. Прочерк означает среднее положение для трёхпозиционного тумблера. Удобно настроить тумблеры все вверх или все вниз, тогда можно быстро, наощупь их переключить в нужное положение перед включением.
Эта функция - не единственная, которая предотвращает случайное включение квада после подачи питания, но настроить её необходимо, так как максимально безопасным квад становится тогда, когда все функции настроены правильно и есть право на ошибку (человеческую или программную).
Жду всех в телеге с вопросами (не канал =).
Для случайных читателей: я в серии своих постов "научил" читателя выбирать, собирать настраивать и управлять фристайл дроном и теперь продолжаю углубляться в тонкости этого хобби. Предполагается, что ваши знания ограничиваются только моими постами.
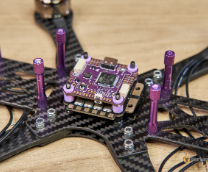
Сегодня настроим RPM filtering - фильтрацию вибраций основанную на оборотах двигателя. Эта функция эффективно улучшает качество полёта (а c ним и картинку) так как динамически подстраивается под основной источник вибраций - вращение моторов.
Для выполнения этой задачи, полётник должен знать текущее значение RPM (обороты в минуту) каждого мотора. Эту функцию добавили в прошивку регулятора относительно недавно, поэтому алгоритм выглядит так:
1. Прошить свежую версию BLHeli_32 (или убедиться, что свежая уже прошита).
2. Включить двунаправленный протокол управления моторами (Bidirectional DShot).
3. Убедиться, что считывается верное значение RPM.
4. Включить RPM фильтрацию в полётном контроллере.
5. Отключить более простой фильтр.
Теперь по пунктам подробнее.
1. Прошить регулятор можно только когда он соединён с полётником и на него подано питание, поэтому лучше это делать на собранном дроне. Нужен софт BLHeli_32 Suite. Подключаем полётник к компу, а батарею к регулятору (квад без пропеллеров!). Нажимаем Connect и Flash BLHeli.
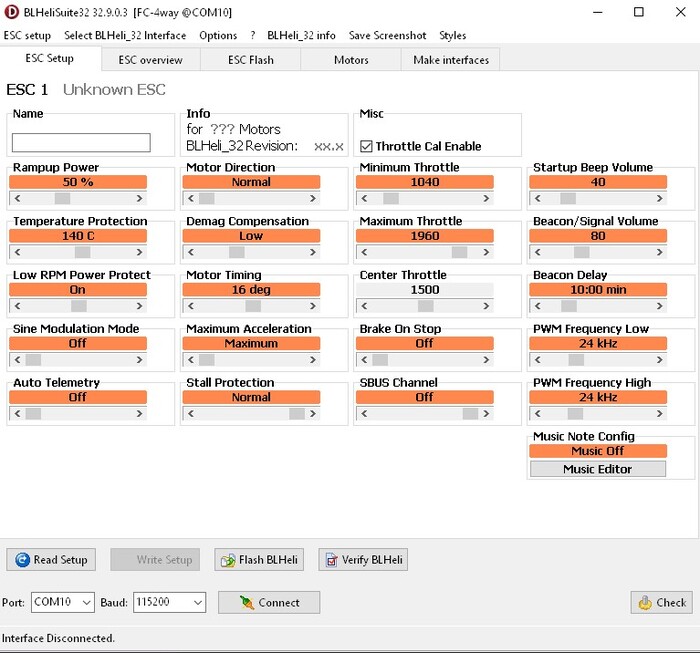
Выбираем последнюю версию и жмём OK.
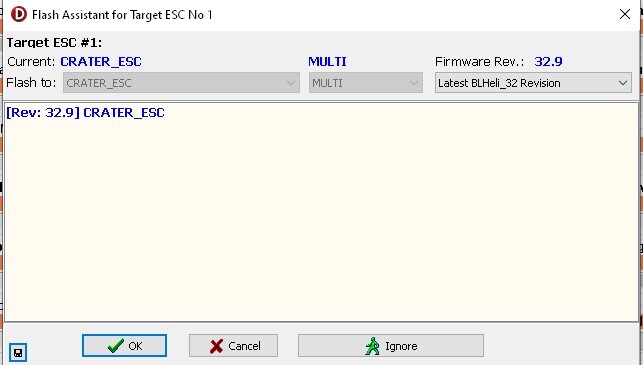
Закрываем BLHeli32 Suite и отключаем батарею.
2. Запускаем Betaflight Configurator и на вкладке Motors включаем Bidirectional DShot. Для правильной работы полётнику нужно знать сколько магнитов в моторе, но значение по-умолчанию работает для абсолютного большинства моторов подходящих для нашего 5-дюймового квада. Если вы настраиваете что-то другое, лучше по моим постам этого не делать.

3. Дальше можно подключить батарею и ползунком запускать каждый мотор. В поле R: должны появиться обороты, а поле E: (ошибки) должно оставаться на нуле. Отключаем батарею.
4. Дальше вкладка PID Tuning и раздел Filter Settings, там включаем Gyro RPM Filter.

При включении будет напоминание, что нужно настроить всё, что мы настроили и автоматически применится настройка фильтра.
5. Теперь можно отключить фильтр Gyro Lowpass 1 (или это произойдёт автоматически)

Всё, теперь фильтрация будет динамической и зависеть от оборотов двигателя.
Чем больше фильтров, тем больше времени нужно полётнику на реакцию, тем менее "отзывчив" квад, однако без фильтров реакция на вибрации заставит слишком часто и интенсивно реагировать моторами на ситуацию и приведёт к большому расходу, шуму и нагреву моторов. А иногда и к "положительной обратной связи" - ситуации, когда слишком резкие корректировки приводят к ухудшению ситуации и к ещё более резким корректировкам. Поэтому экспериментировать с фильтрами нужно со знанием дела. Только что настроенный фильтр - один из немногих полезных и безопасных настроек фильтров, который улучшает поведение и раскрывает потенциал микроконтроллеров на борту.
Как обычно телега для всех вопросов.
