Перемотчик на 3D-принтере
"Часто работаю с проводами небольших сечений(от 0.12 до 1). Для удобства их нужно перематывать с бухты на катушки. Так же давно хотелось "раскурить" темы сенсорных дисплеев, шаговых моторов и их драйверов. После появления Bambu принтеров тема перемотки пластика тоже стала более актуальна." Так начинался предыдущий пост по этой теме. В конце данного поста несколько познавательных видео.
Как оказалось перематывают не только провода и пластик для печати а вообще всё тонкое и длинное. Обратился ко мне человек с просьбой допилить проект. Я конешно и сам думал когда-то доделать перемотчик до того вида до которого он планировался но в силу тотального распяздяйсва и лени он был отложен на когда-то потом. Требовалось сделать укладчик с возможностью его движения по двум осям с независимым шагом друг относительно друга и настройкой этого самого шага. Подсчёт метража, аварийная остановка, тормоз донорской катушки, снижение скорости в зависимости от настройки, отключение защиты... Казалось бы "а хули там делать...". Ага, ваще как два пальца об асфальт. Программист из меня никакой((( Но, как говорится "терпение и труд...". Пришлось освоить софт по разводке плат. Отдавать заказчику макетную плату с кучей проводов было как минимум стыдно а как максимум позорно.
Графический интерфейс мне рисовала знакомая девушка. До сих пор рисует и конца и края пока не видно. Мы с ней потихонечку определились с дизайном и по мере моего продвижения по говнокоду добавляем всякие нужные мне кнопочки. Изначально я думал, что нужна всего пара кнопок типа "старт", "стоп", "скорость". Ох как я ошибался. На пиксельных девок внимания не обращаем. Они тут специально для того, что бы заполнить пустоту ̶в̶ ̶д̶у̶ш̶е̶ на экране.
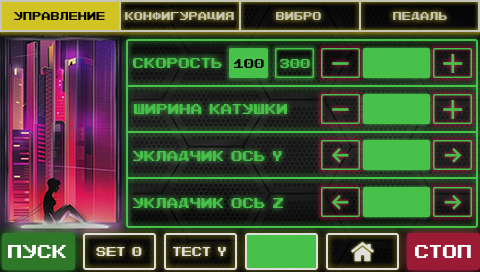
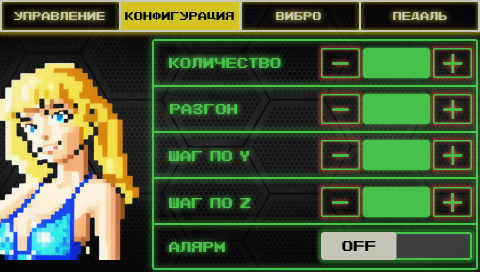
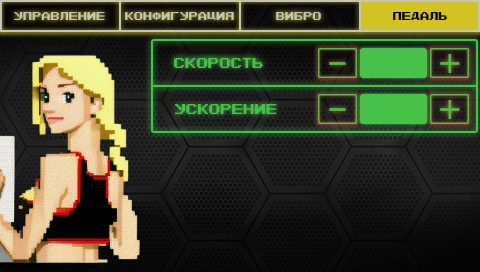
интерфейс сенсорного дисплея
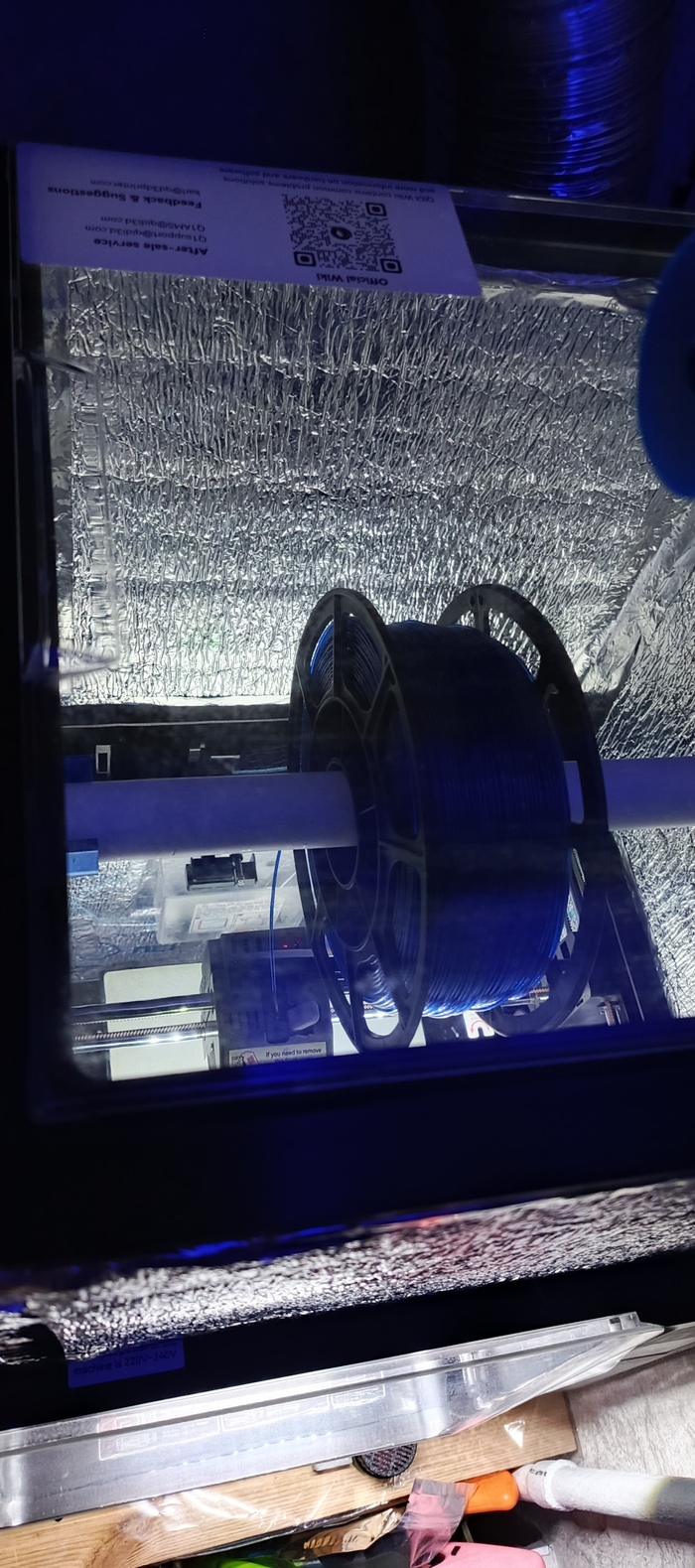
Изначально я задумывал этот проект как универсальный. То есть его можно было бы легко переделать под свои задачи. Например использовать катушки большего или меньшего диаметра, катушки с меньшим или большим отверстием, более широкие катушки а может даже и намотка трансформаторов, установка датчика Холла, энкодера, датчика окончания нити, датчик натяжения нити...Возможность лёгкой замены основного мотора на более мощный
Для всего этого функционала нужно выводить настройки на дисплей. Например такие как: Передаточное отношение главной пары, шаг винта по оси Y, шаг винта по оси Z, ширина катушки, количество оборотов, обратный отсчёт, ускорение, торможение...ААААА!!!.... Да даже толщина трубки укладчика принимает участие в расчёте координат по которым этот укладчик катается. То есть пользователь, переделав механику под свои задачи сможет настроить контроллер прямо с экрана не ковыряясь в чужом коде. Все печатные детали влезают на стол 250х250. "Железо" покупается на маркетплейсах. Винты и гайки все стандартные. Получился такой конструктор для мальчиков. В качестве основания использован алюминиевый профиль 20х20. Тормоз донорской катушки, пока для теста, реализован на токах Фуко.