Энкодер на базе HEDR и STM32
Всем привет!
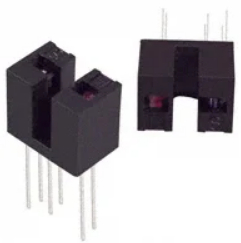
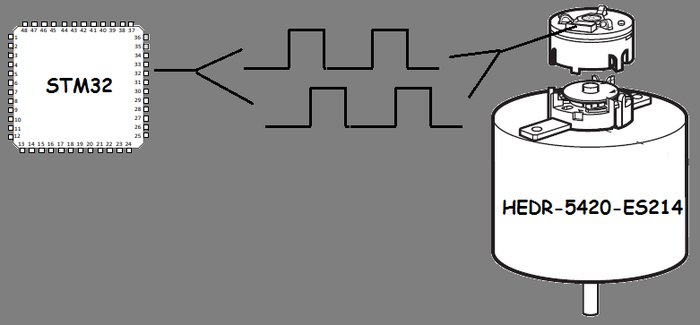
В данной статье я хочу Вам рассказать про датчик HEDR(от компании avago technologies) - это двухканальный инкрементальный оптический датчик, предназначен для измерения пройденного пути, линейной скорости, угловой скорости и направлении вращения вала.
С помощью данного датчика будет реализован энкодер на базе микроконтроллера STM32, который будет производить вычисление пройденного пути.
В данной статье будет рассмотрено:
Принцип работы датчика HEDR-5420-ES214;
Схема подключения к микроконтроллеру STM32;
Программная реализация (расчет пройденного пути и вывод информации на дисплей).
Технические характеристики датчика HEDR-5420-ES214
Напряжение питания [ 4.5 - 5.5В ];
Тип выхода [ квадратурный ];
Диаметр вала [ 5 мм ];
Разрешение [ 200 отсчетов на оборот ];
Рабочая температура [ от -10°C до +85°C ].
Принцип работы датчика HEDR-5420-ES214
Устройство состоит из трех основных компонентов:
Источник света (светодиод, формирующий поток света);
Оптическая система (линза, обеспечивает фокусировку и отражение света);
Фотодетектор.
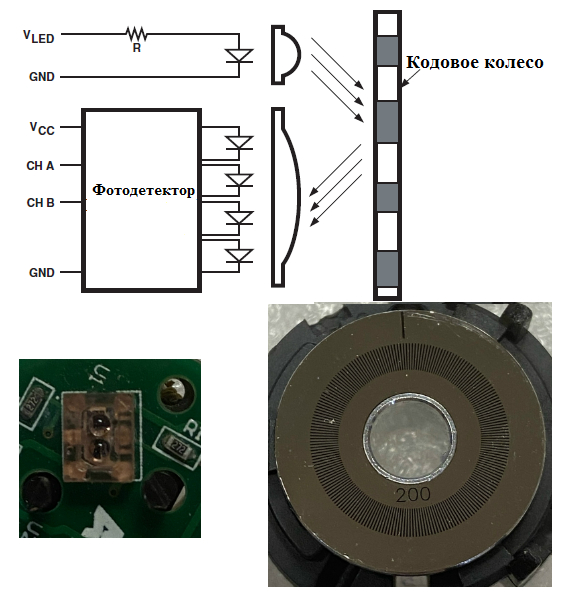
Линза фокусирует излучаемый свет на кодовое колесо (диск с чередующимися отражающими и неотражающими участками), при вращении диска, отраженный свет проходит обратно через оптическую систему и попадает на фотодиоды, таким образом на их поверхности формируется чередующийся рисунок света и тени, соответствующий узору кодового диска.
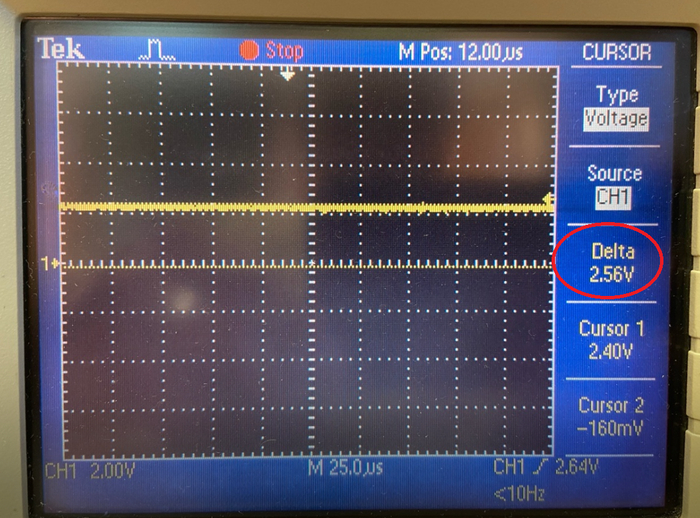
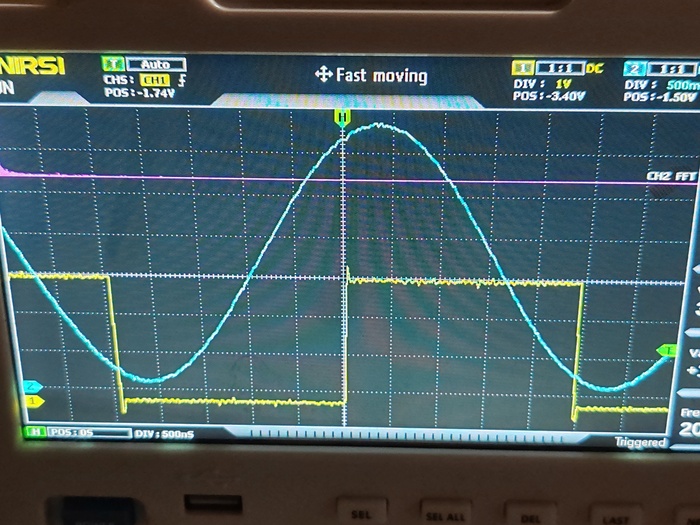
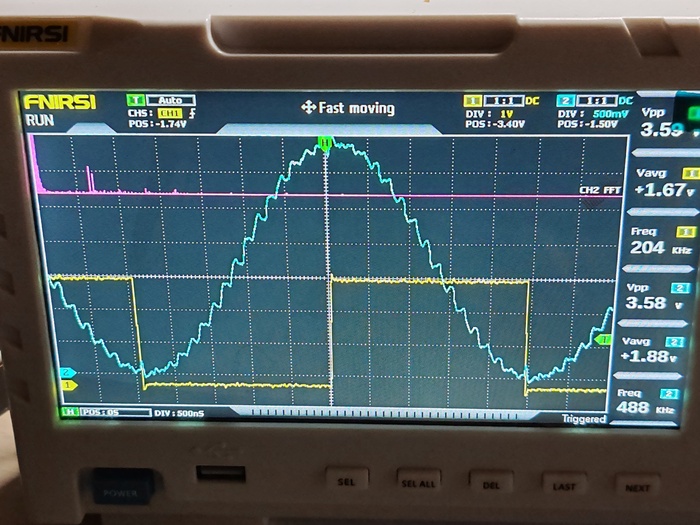
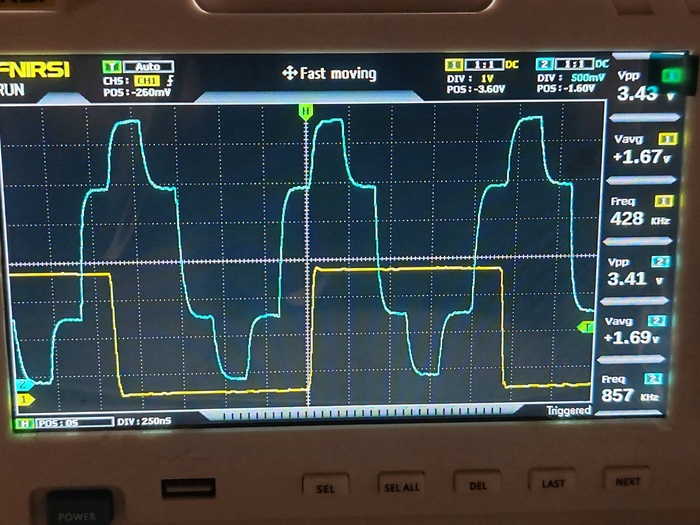
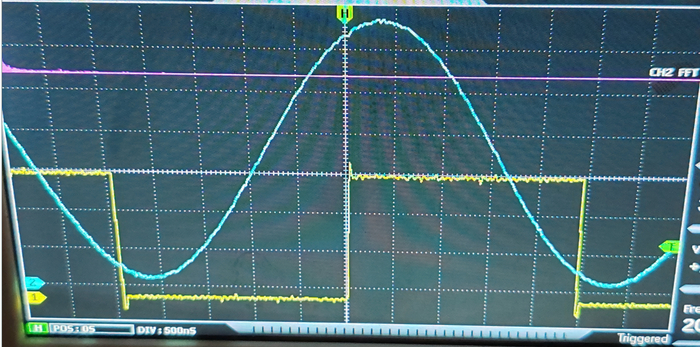
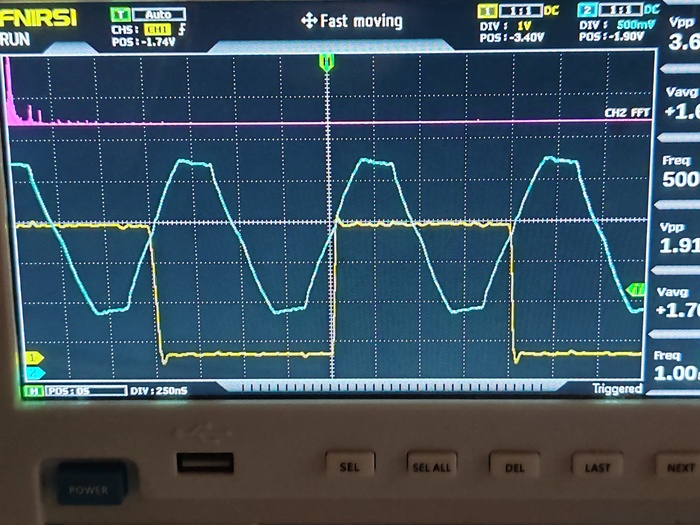
Эти изменения интенсивности света преобразуются в внутренние сигналы А и В, которые проходят через компараторы в составе обработки сигналов, на выходе формируются два цифровых прямоугольных сигнала - канал А и В, находящиеся в квадратурной фазе на 90°, что позволяет микроконтроллеру определять направление вращения вала, к примеру:
если канал А опережает канал B - вращение происходит в одну сторону;
если канал B опережает канал А - вращение происходит в противоположную сторону.
Для своей задачи применяется следующая последовательность, если канал А опережает канал B - движение энкодера считается положительным, если на оборот, то движение будет отрицательным.
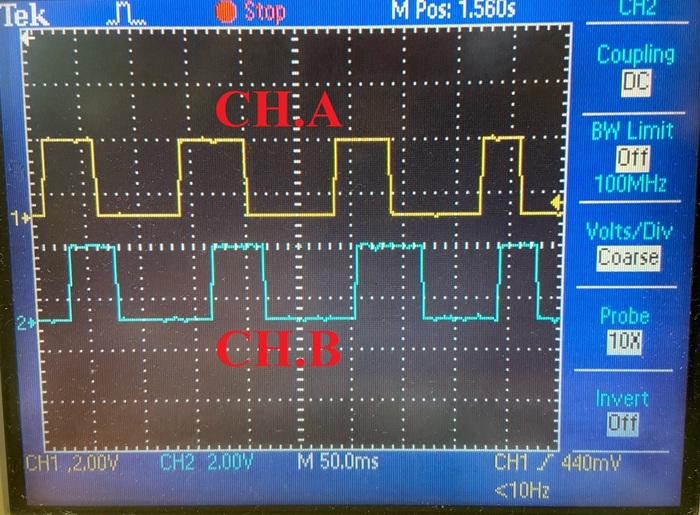
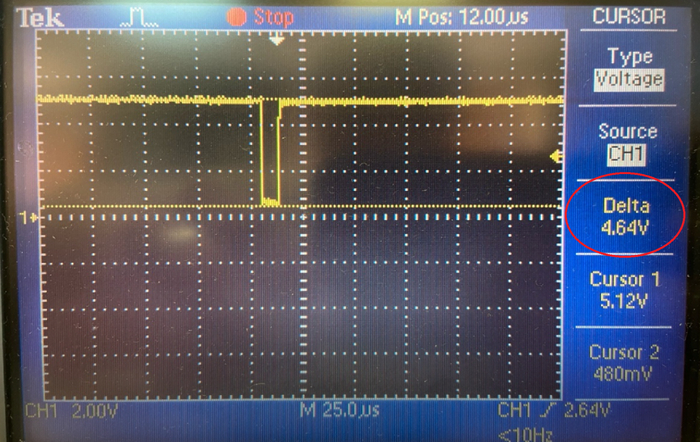
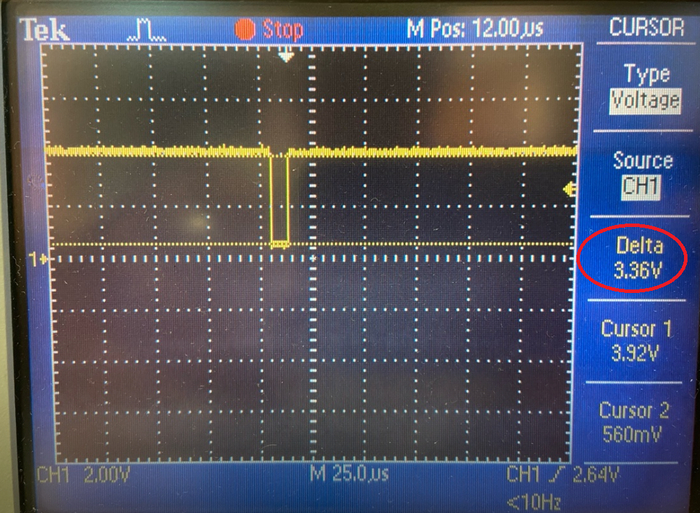
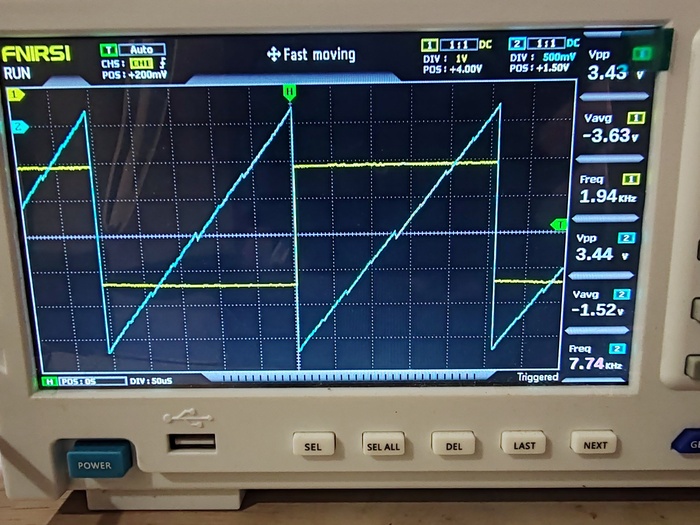
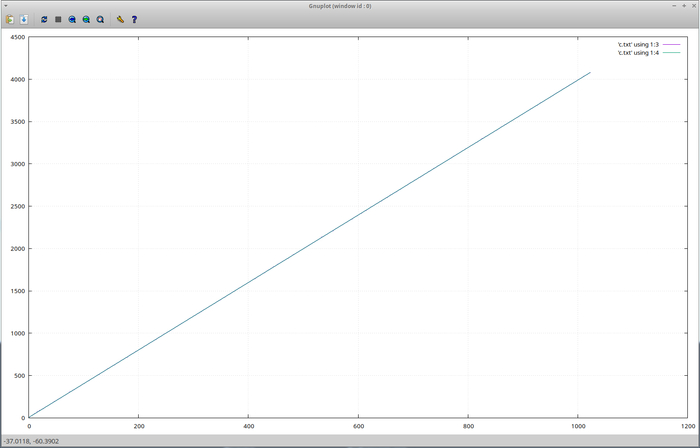
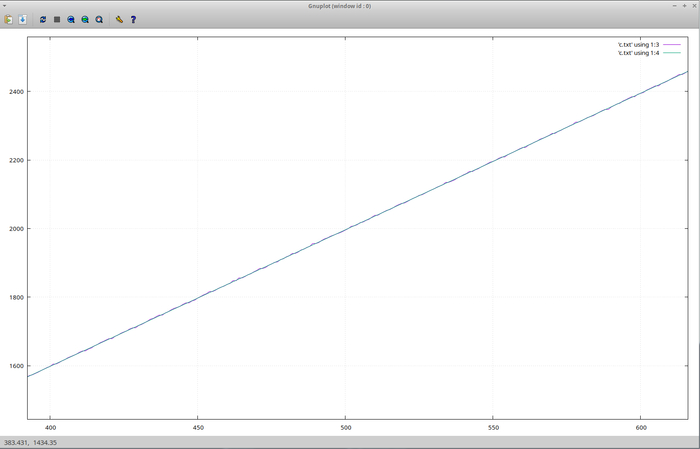
Осциллограмма данных полученных с датчика HEDR-5420-ES214
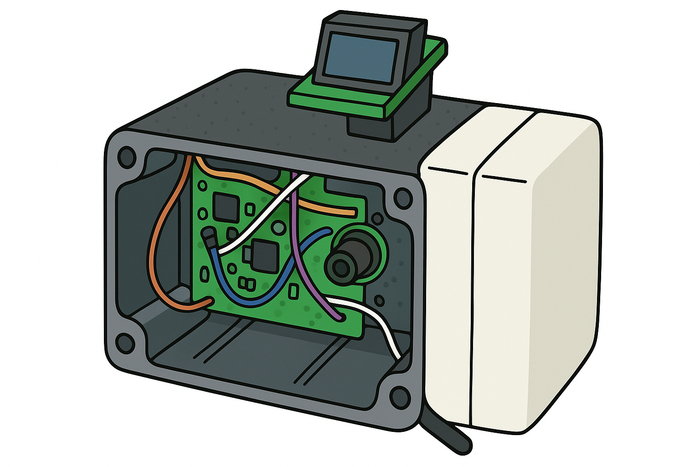
Схема подключения к микроконтроллеру STM32
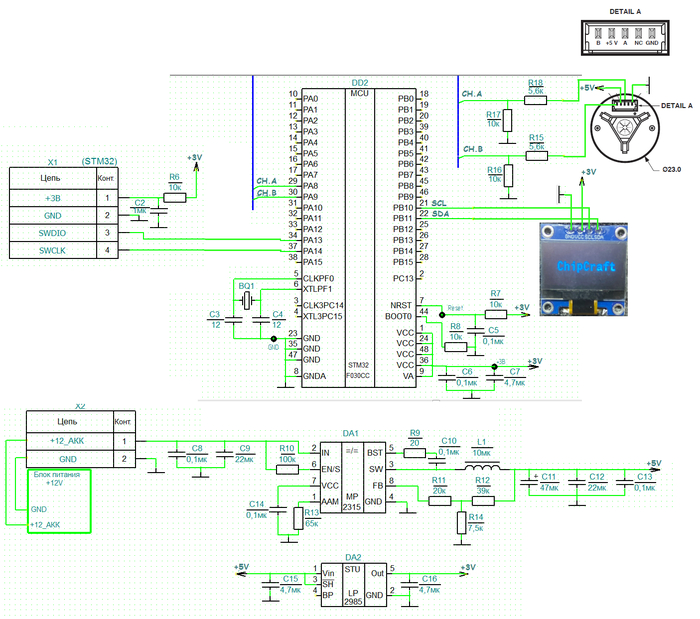
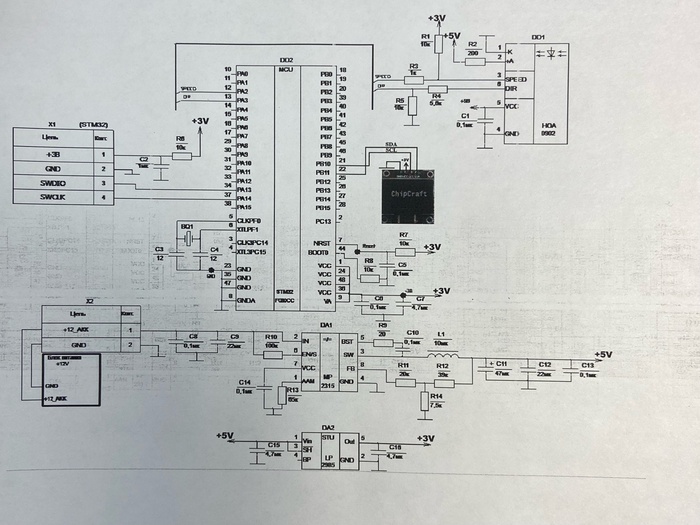
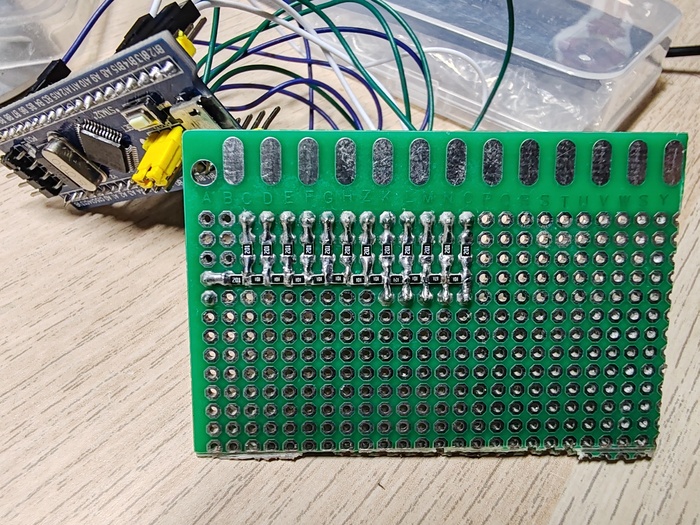
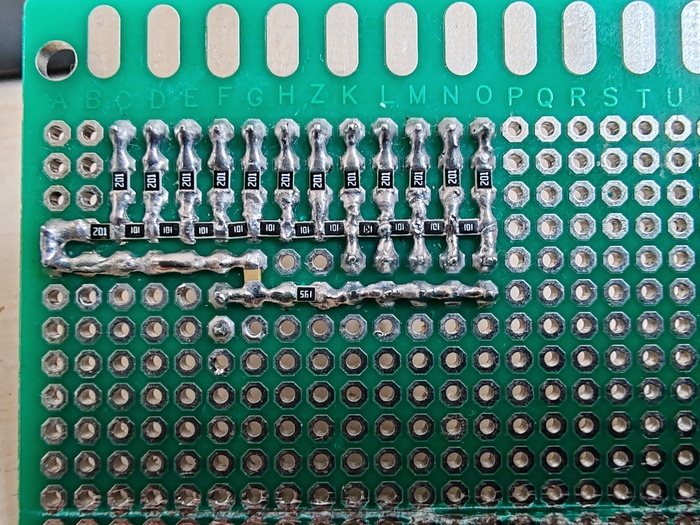
Схема подключения HEDR и дисплея к микроконтроллеру STM32F030CCT6
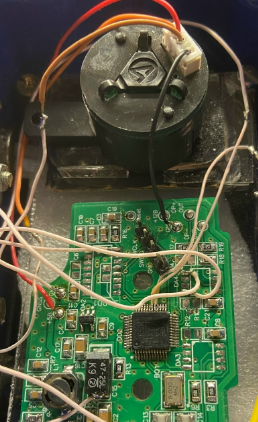
Макет STM32F030CCTx и HEDR
В данной схеме используются преобразователь напряжения DA1 (+12V +5V) и стабилизатор напряжения DA2, дисплей подключается к выводам МК 21_SCL_I2C2 и 22_SDA_I2C2, датчик HEDR подключается к выводам МК 29_CH.A и 30_CH.B, данные сигналы сначала проходят через делители, R17-R18-[CH.A] и R15-R16-[CH.B], так как датчик работает от +5V, сигналы соответственно тоже у него +5V, я всегда стараюсь дополнительно защитить МК, после делителя амплитуда сигналов снизится до +3.3V, копипастить информацию по описанию узлов преобразователя, стабилизатора, узла обвязки напряжения питания и резонатора для МК не особо хочется, поэтому кому интересно можно почитать статью [Модуль обработки и коммутации данных, с внешними управляющими устройствами по RS-485 на STM32]
Настройка микроконтроллера STM32F030CCTx в CubeIDE
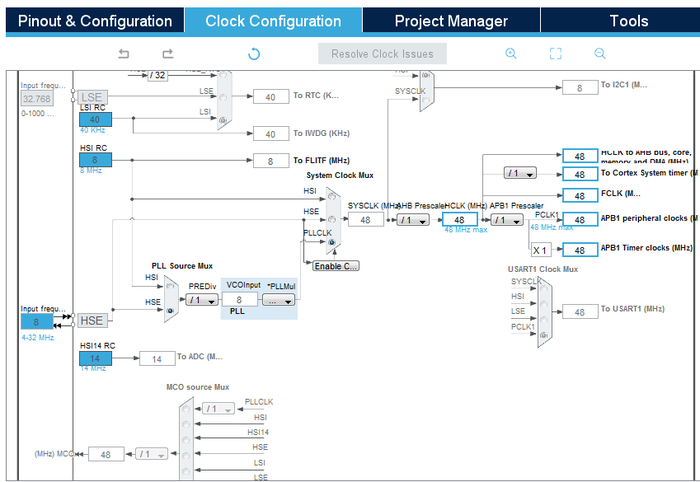
Настройка RCC и SYS (в RCC выбираю Crystal/Ceramic Resonator, так как у меня внешний кварц на 8 МГц)

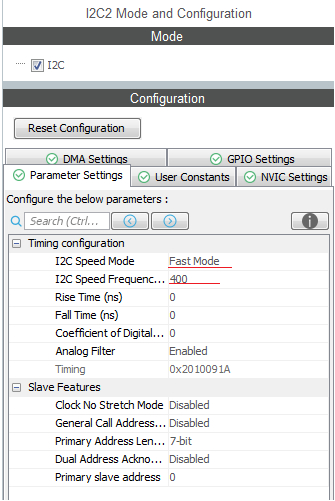
Настройка дисплея
Взаимодействие дисплея с МК будет через I2C2
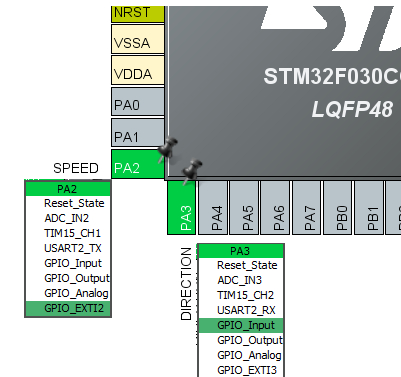
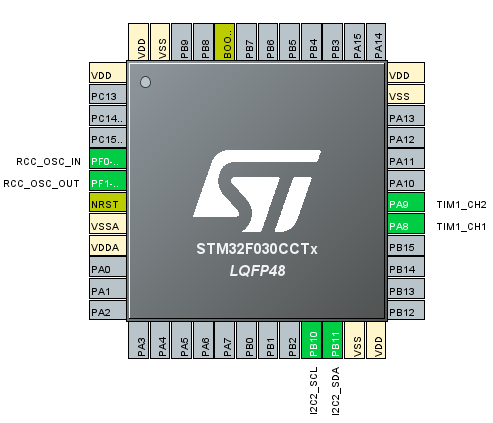
Настройка выводов узла подключения датчика HEDR
TIM1_CH1 (к данному выводу будет подключаться сигнал CH.A);
TIM1_CH2 (к данному выводу будет подключаться сигнал CH.B).

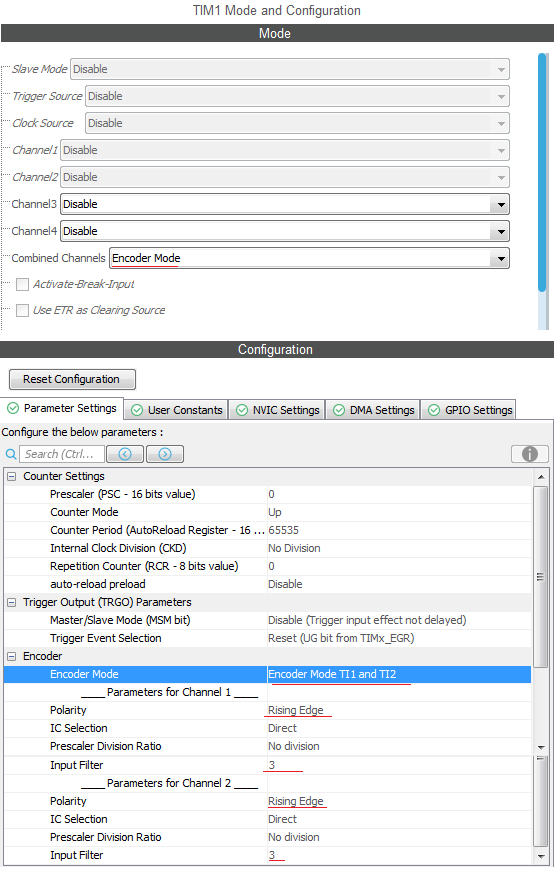
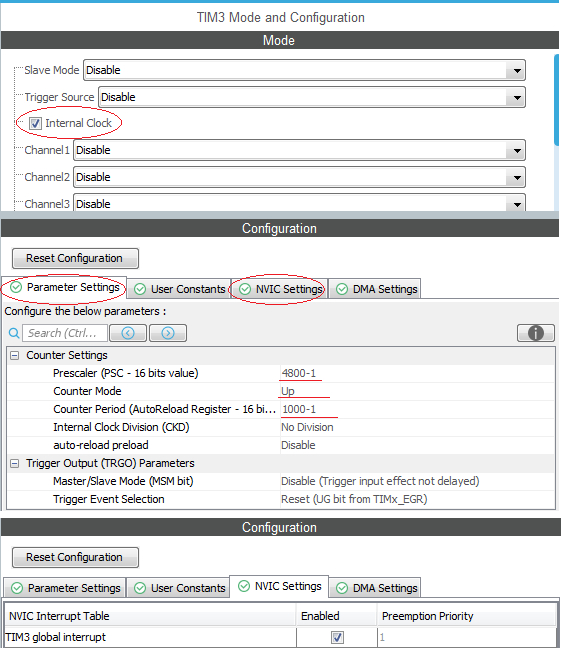
Таймер используется в режиме Encoder mode - это специальный аппаратный режим, который позволяет микроконтроллеру автоматически подсчитывать импульсы от инкрементального датчика и определять направление вращения, данная конфигурация освобождает МК от необходимости программно обрабатывать прерывания по каждому импульсу.
Encoder Mode TI1 and TI2 данный параметр указывает, что используется оба канала датчика (A и B), это дает разрешение X4 - т.е. счетчик будет увеличиваться на 4 шага за один полный оборот.
Описание режимов
TI1 - подсчет ведется по фронту одного канала А, направление определяется по уровню В, разрешение 1.8 градусов;
TI2 - аналогично логике TI1, но базируется на канале В;
TI1 and TI2 - подсчет ведется на каждом фронте обоих каналов (А+, А-, В+, В-), направление определяется автоматически, т.е. количеством импульсов на оборот 200, я получаю 800 шагов на оборот, разрешение будет 0.45 градусов.
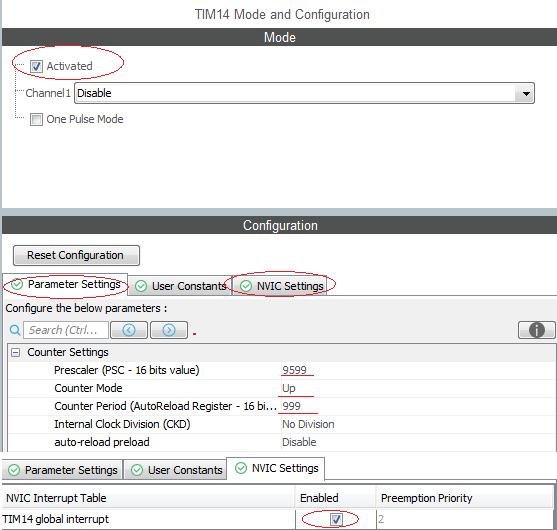
Input Filter - включает цифровую фильтрацию входного сигнала, помогает убрать дребезг и шум, значения от 0 до 15, чем выше значение, тем надежнее фильтрация, но будет повышаться задержка.
Polarity (Rising Edge) - счетчик реагирует на восходящие фронты сигнала.
Настройка Clock
Программная реализация ведомого устройства
Ссылка на скачивание исходного кода [ https://t.me/ChipCraft В закрепленном сообщении [ #исскуствомк_исходный_код — Исходный код для Encoder_HEDR_5420_STM32F030CCTx].
Модуль process_Encoder
Данный модуль реализует считывание сигналов с инкрементального датчика HEDR и вычисляет:
Количество импульсов на оборот;
Пройденную дистанцию;
Отображение данных на дисплее.
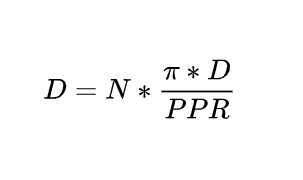
#define ENCODER_MODE_X4 4
Данный параметр отражает режим подсчета импульсов, привожу формулу
Этот режим обеспечивает максимальную точность - 0.45 на один шаг.
#define WHEEL_DIAMETR_M 0.230f // 230 мм
#define WHEEL_RADIUS_M (WHEEL_DIAMETR_M / 2.0f)
Здесь я задаю геометрические размеры колеса, на валу которого установлен датчик%
Диаметр колеса 230 мм (0.230м);
Радиус вычисляется так:
#define STEPS_PER_REV (ENCODER_PPR * ENCODER_MODE_X4)
Максимальное количество шагов за один оборот
#define CIRCUMFERENCE_M (2.0f *M_PI * WHEEL_RADIUS_M)
Длина окружности колеса - это путь, который проходит колесо за один оборот

т.е. при моем радиусе 0.115, получится за один полный оборот 0.72 м.
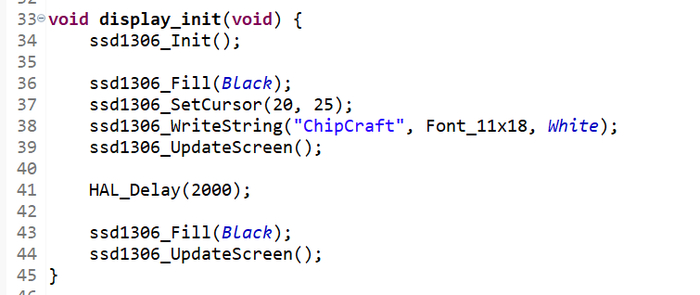
Функция display_init() - инициализация дисплея
Инициализируется драйвер дисплея;
Выполняется заливка экрана черным цветом;
На дисплее на 2 секунды отображается стартовый экран с надписью ''ChipCraft";
После задержки экран очищается для дальнейшей работы.
библиотеку для работы с дисплеем я взял с [https://github.com/afiskon/stm32-ssd1306/tree/master]
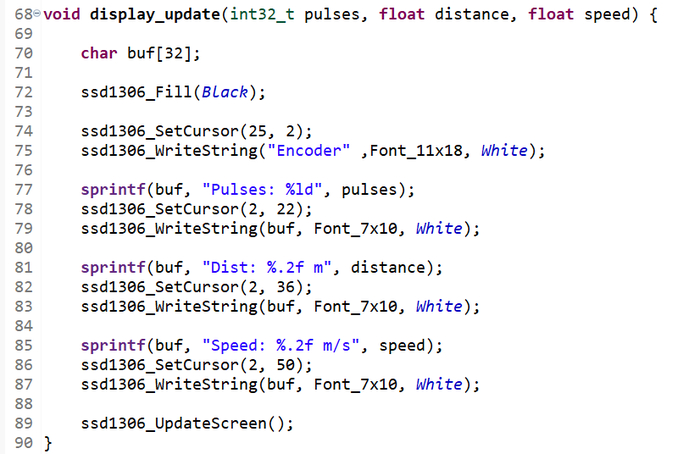
Функция display_update()
Отвечает за визуализацию информации на дисплее:
Экран предварительно очищается с помощью ssd1306_Fill(Black);
В верхней части по центру отображается надпись «Encoder»;
Ниже последовательно выводятся:
количество импульсов;
дистанция;
Буфер графики передается на дисплей вызовом ssd1306_UpdateScreen()
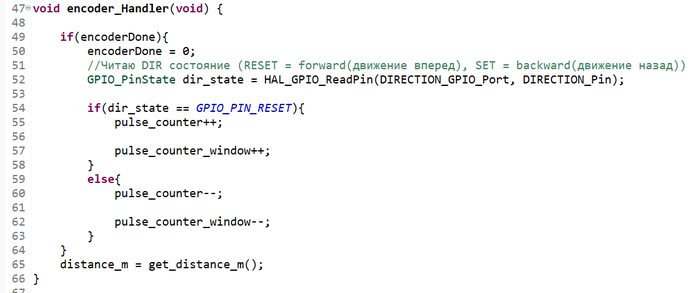
Функция encoder_Handler()
Логика работы:
считывание текущего значения таймера;
определение разницы (delta) между текущим и предыдущим значениями;
накопление общего счетчика enocoder_position;
вызов функций для вычисления дистанции и обновление дисплея.
Функция get_distance_m() - вычисление пройденной дистанции
Переводит количество импульсов датчика в физическую длину пути в (метрах).
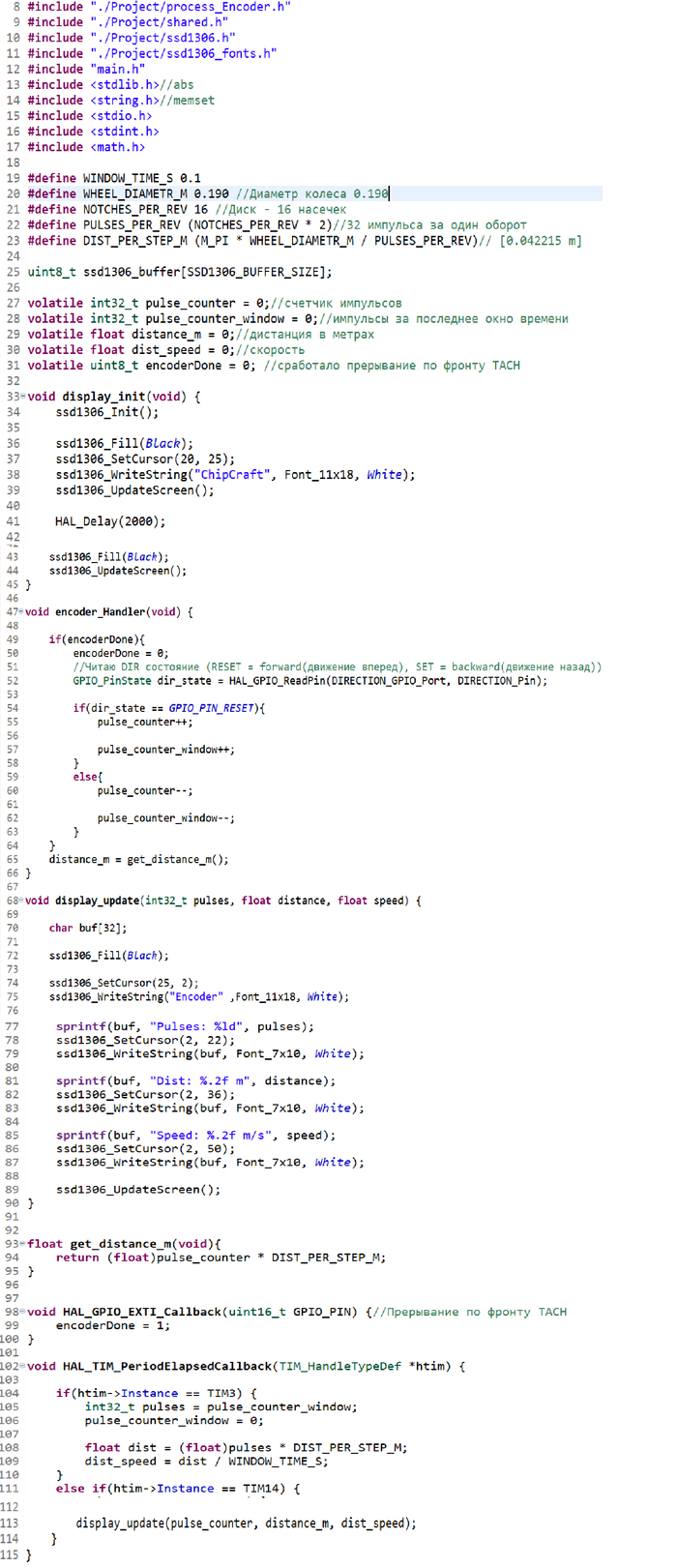
process_Encoder.c
#include "./Project/process_Encoder.h"
#include "./Project/shared.h"
#include "./Project/ssd1306.h"
#include "./Project/ssd1306_fonts.h"
#include "main.h"
#include <stdlib.h>//abs
#include <string.h>//memset
#include <stdio.h>
#include <stdint.h>
#include <math.h>
#define ENCODER_PPR 200 // импульсов на оборот
#define ENCODER_MODE_X4 4
#define WHEEL_DIAMETR_M 0.230f // 230 мм
#define WHEEL_RADIUS_M (WHEEL_DIAMETR_M / 2.0f)
#define STEPS_PER_REV (ENCODER_PPR * ENCODER_MODE_X4)
#define CIRCUMFERENCE_M (2.0f *M_PI * WHEEL_RADIUS_M)
uint16_t current_count= 0;
int16_t delta = 0;
float distance = 0.0f;
int32_t encoder_position = 0;
uint8_t ssd1306_buffer[SSD1306_BUFFER_SIZE];
void display_init(void) {
ssd1306_Init();
ssd1306_Fill(Black);
ssd1306_SetCursor(20, 25);
ssd1306_WriteString("ChipCraft", Font_11x18, White);
ssd1306_UpdateScreen();
HAL_Delay(2000);
ssd1306_Fill(Black);
ssd1306_UpdateScreen();
}
void encoder_Handler(void) {
static uint16_t last_count = 0;
current_count = __HAL_TIM_GET_COUNTER(&htim1);
delta = (int16_t)(current_count - last_count);
encoder_position += delta;
last_count = current_count;
get_distance_m();
display_update(encoder_position, distance);
}
void display_update(int32_t pulses, float distance) {
char buf[32];
ssd1306_Fill(Black);
ssd1306_SetCursor(25, 2);
ssd1306_WriteString("Encoder" ,Font_11x18, White);
sprintf(buf, "Pulses: %ld", pulses);
ssd1306_SetCursor(2, 22);
ssd1306_WriteString(buf, Font_7x10, White);
sprintf(buf, "Dist: %.2f m", distance);
ssd1306_SetCursor(2, 36);
ssd1306_WriteString(buf, Font_7x10, White);
ssd1306_UpdateScreen();
}
float get_distance_m(void){
distance = ((float) encoder_position / STEPS_PER_REV) * CIRCUMFERENCE_M;
return distance;
}
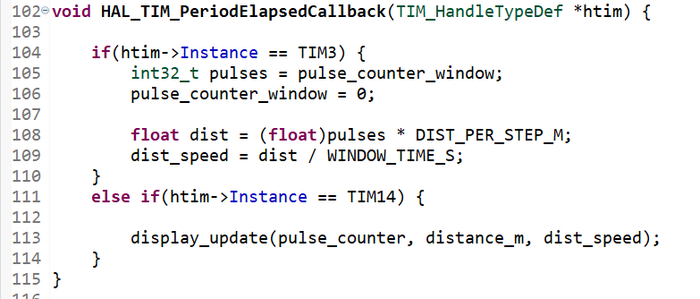
Модуль proj_main() - главный метод
Выполняется инициализация дисплея;
Запуск таймера;
Запуск функции encoder_Handler().
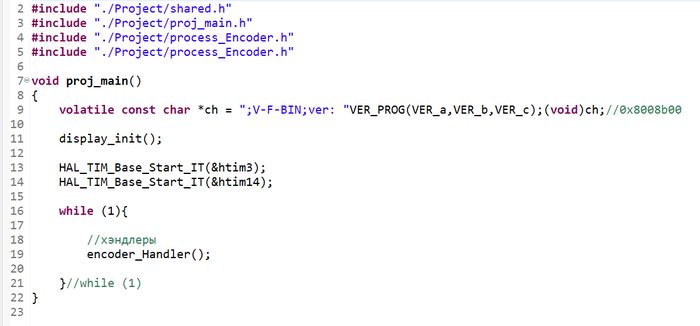
proj_main.c
#include "./Project/shared.h"
#include "./Project/proj_main.h"
#include "./Project/process_Encoder.h"
#include "./Project/process_Encoder.h"
void proj_main()
{
volatile const char *ch = ";V-F-BIN;ver: "VER_PROG(VER_a,VER_b,VER_c);(void)ch;//0x8008b00
display_init();
HAL_TIM_Encoder_Start(&htim1, TIM_CHANNEL_ALL);
while (1){
//хэндлеры
encoder_Handler();
}//while (1)
}
Если статья показалась Вам интересной, буду рад выпустить для Вас еще множество статей исследований по всевозможным видам устройств, так что, если не хотите их пропустить — буду благодарен за подписку на мой ТГ-канал.